Kenco Pipe-Lift®

The Kenco Pipe Lift is the safest and most effective way to move, place or set pipe of all sizes and requires no hydraulics to operate.

The Kenco Pipe Lift is the safest and most effective way to move, place or set pipe of all sizes and requires no hydraulics to operate.

Designed for a wide range of professional applications:
USE IT TO LIFT A VARIETY OF PIPE TYPES

![]()
Use the power of gravity to allow the scissor action of our pipe lifter attachment to clamp securely on PVC, ductile iron or reinforced concrete pipe. If you have ever tried to move pipe using straps or teacups, you’ll appreciate how the Kenco Pipe Lift increases productivity. Need more versatility? Check out the Kenco MultiLift device.
Double production output versus the sling and chain methods with these lifting clamps and scissor lifting tongs. The Pipe Lifter’s unique, wide scissor-grip design permits a secure lift – even when the lifter is not completely centered on the pipe.
Buy pipe lifter attachments from a company that makes quality a priority. With our selection, you can easily lift and move pipes. To learn more about a specific pipe lift, review the documents under the Resource tab; here, we have detailed info and spec sheets as well as digital manual for each model.
The operator can use these pipe lifting tongs to grab, lift and move pipe without assistance. The operator simply sets the tongs down onto the pipe and the legs of the pipe lifting clamp automatically grab on tightly. These concrete pipe pickers won’t release until the pipe has been set back down firmly into position.
Standard models are available for 4″ to 48″ pipe and can be modified to handle more than the rated capacity. Custom units of these lifting clamps & pipe tongs are also available and have been built in excess of 120″ diameters. All Kenco Pipe Lifters can be fit with a rubber lining to prevent scratching or marring of the pipe. You can check the Kenco store for more variations & attachments.
Kenco patented below the hook lifting products are designed, manufactured and tested in compliance with the latest revisions of the ASME B30.20 and BTH-1 standards and are accepted by OSHA, CanOSH, as well as virtually all other world wide standards. The Pipe Lift is a patented design under US Patent 6012752.
All Kenco lifting products are hand tested by our engineering staff before it leaves our facility.
Do you have questions about one of our pipe lifter attachments? Contact our team here or call (800) 653-6069 and we’ll get back to you as soon as possible.
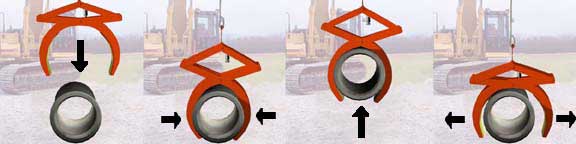
1. Lifter is latched in open position, ready to lower onto load.
2. Operator rests lifter on load, which causes actuator to release.
3. Operator raises hook, causing lifter to grip automatically.
4. Load is moved to destination and lowered. The operator again rests the lifter on the load, which causes the actuator to automatically latch.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}